Robotart
The artist
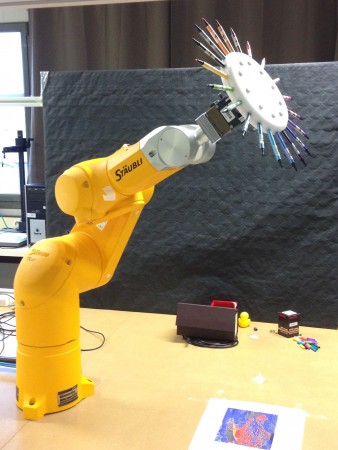
The robot Staubli Tx60. Our project aims reproduction of an image using a robot. There are two methods to obtain an image, the first is to take a photo using the camera and then treat it with the help of our program, or then directly take a picture from the computer and perform treatment with the same program. To reproduce images selected by our robot, he is equipped with a wheel with 20 felts-tip pens for the differents colors. Therefore we can not reproduce all the colors, which is why we use a calculation to determine which color is closest to the pixel of the image. But before making this calculation we pass the 20 colors of our felts-tip pens and each pixel of the image in the CIE lab the largest color space to more faithfully respected the colors and then calculate the closest one. Once this is done we send a coordinated file containing the image size and the number of each pixel felt-tip pen used by the robot so that it can start printing. The robot selected the appropriate felt-tip pen with a rotation of the wheel and just make a point on the corresponding pixel on the sheet. However with the point to point method printing the time to finish a picture was incredibly long so we have developed a method of performing lines if several pixel of the same color in sequence. Once the last pixel image is made complete, then we can congratulate the artist.
Category: Previous work
Robot Staubli Tx60
The robot with the wheel.
External links
The robot in action
Comments
Log in or sign up to post a comment.