Record
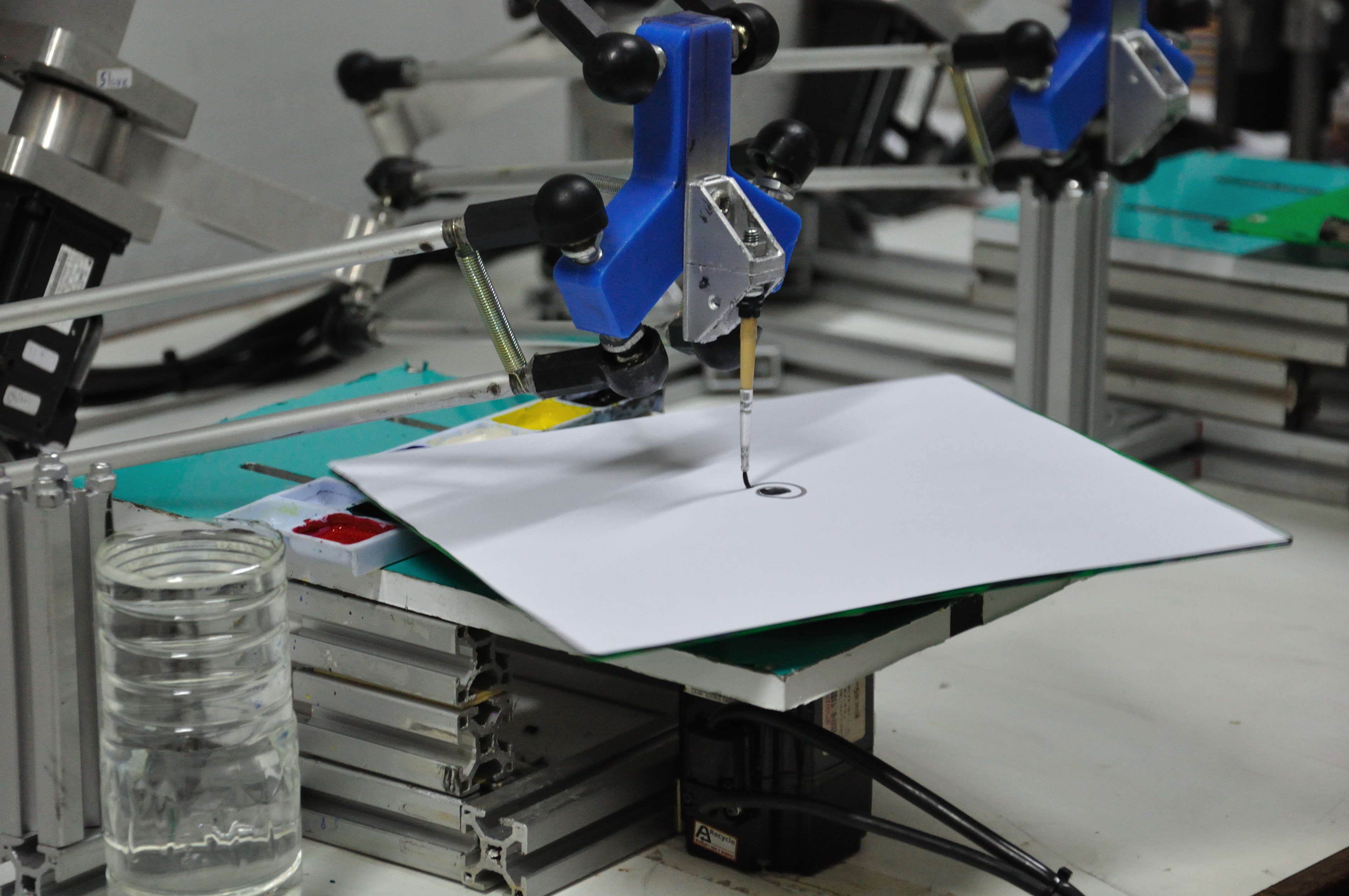
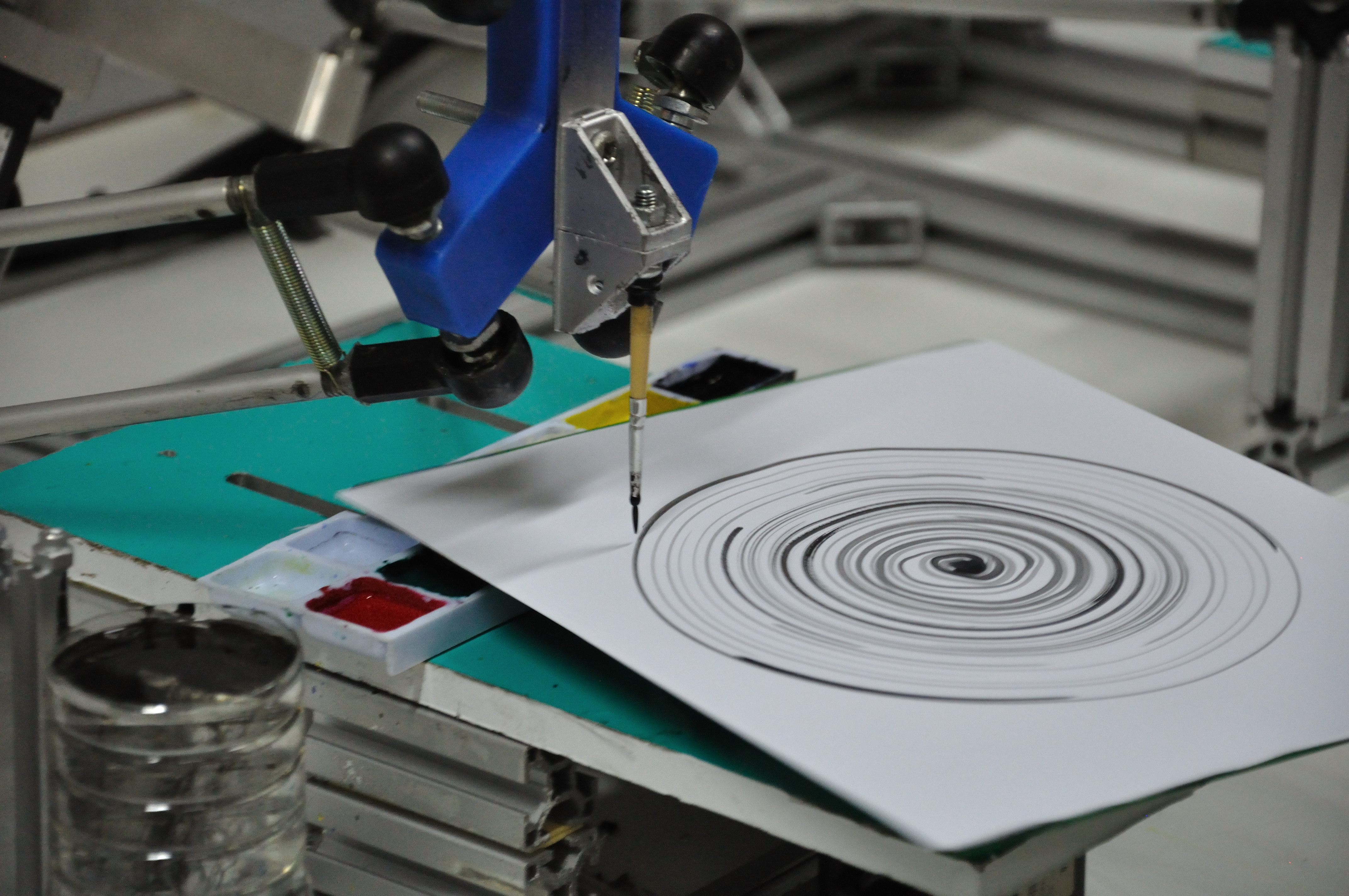
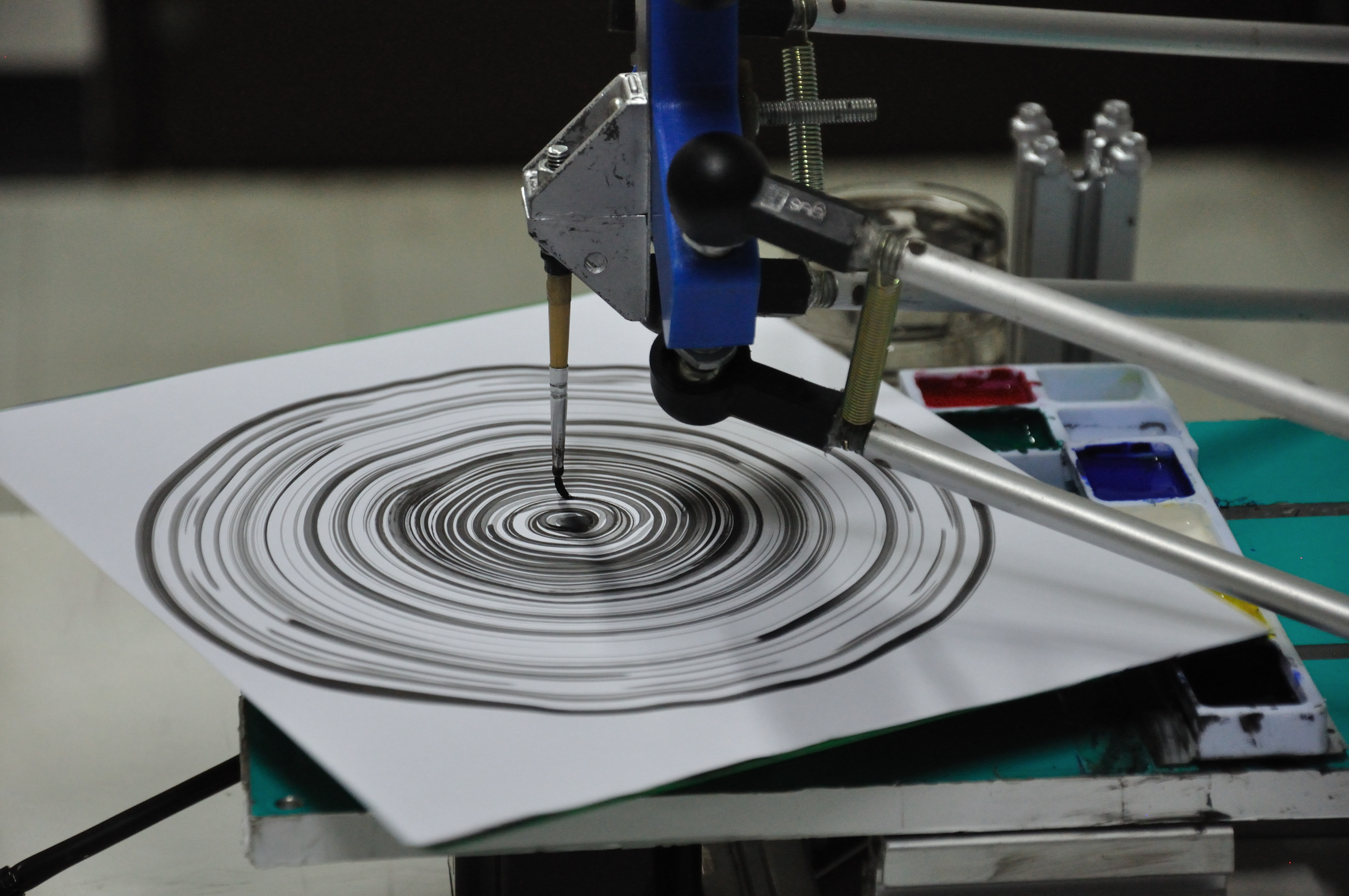
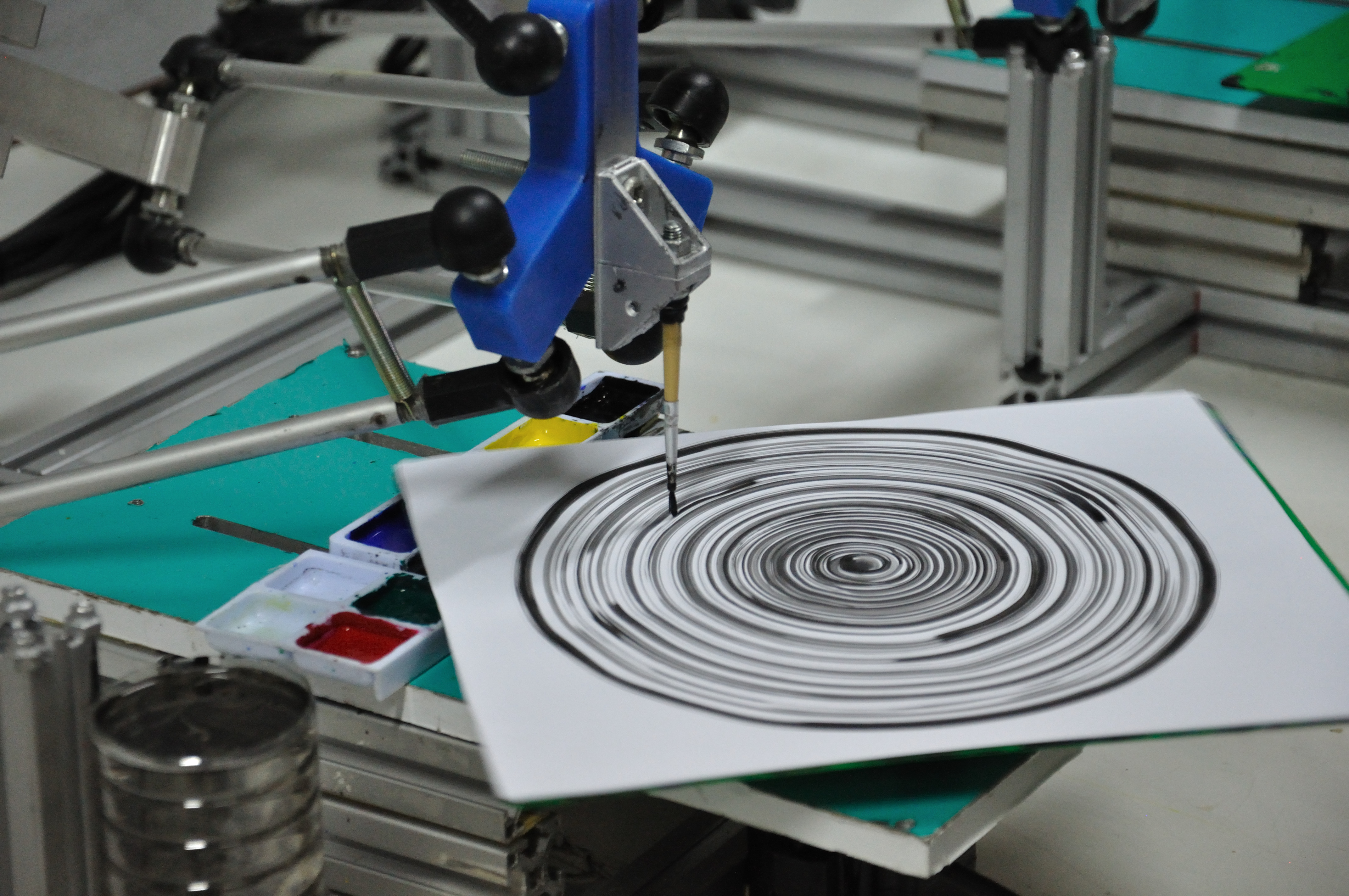
This artwork painting depicts the shape of record disc. Multimedia technologies are used widely today because of their advantages to transform and record experience information. A gramophone record (phonograph record) in the US is an analog sound storage medium in the form of a flat polyvinyl chloride disc with an inscribed, modulated spiral groove. In this artwork, we present haptic human-robot collaboration system based on master-slave delta robot to record touching sensation from artist. Auditory sensations are one-way communication information, whereas touching sensation is two-way communication information based on action and reaction. This is our main target of research work to record human touching sensation as digital haptic data. We first use the bilateral control with motion copying system to record both the interaction force and position responses from artist. We then use the motion replaying system with haptic processing to recreate artwork. The proposed human-robot collaboration system enables robot not only to recreate artworks, but also to improve their performance from the force and position data processing. Only black ink is used to paint the artwork. We use round brush size 1 mm. It takes approximately 20 minutes to use a paint brush for this artwork. The total haptic file (position and force data) sizes for recreate artwork are about 191.052 MB
Category: Original artwork
Record
This artwork painting depicts the shape of record disc. In this artwork, we present haptic human-robot collaboration system based on master-slave delta robot to record touching sensation from artist. The turntable robotic is also specially design to rotate and to control speed of the drawing pad. Only black ink is used to paint the artwork. We use round brush size 1 mm. It takes approximately 20 minutes to use a paint brush for this artwork. The total haptic file (position and force data) sizes for recreate artwork are about 191.052 MB




Total Votes: 0
Comments
Log in or sign up to post a comment.