Robotart
e-David Selfportrait
The inspiration behind this self portrait came from a picture that was taken by the visual feedback system of e-David. We used the perspective of this photo (e-David at work) as the only input data for our painting algorithm. All other input data — region, colour, brush stroke orientation, etc. — was then chosen from a database we work with. We preselected different stroke patterns and hatchings, and then implemented the corresponding arm movements. Liat Grayver (painter) then used a high-level interface that we’ve created specifically for this project to let the painting robot e-David paint his own self portrait. This language is based on masking regions and then selecting one of the predefined variable stroke patterns and the freely selectable paint palettes. The final artwork is then not a reproduction of a photo — it is an original artwork created as the result of a collaboration between e-David and Grayver.
Category: Original artwork

Final painting
Final version of the “Self Portrait” created by the e-David in collaboration with Thomas Lindemeier (programmer) and Liat Grayver (painter). Acrylic on canvas, 60x80, 2016

Inspirational Photo
This is the photo that inspired us to have the e-David create a self portrait. We did not use this or any other photo as input for the actual painting process.

Sketches
Preliminary sketches — sketchpad drawings (coloured pencils) and an oil paint draft made by painter Liat Grayver — that were part of the development stages while planning and preparing to generate e-David’s “Self Portrait”.
High Level Interface
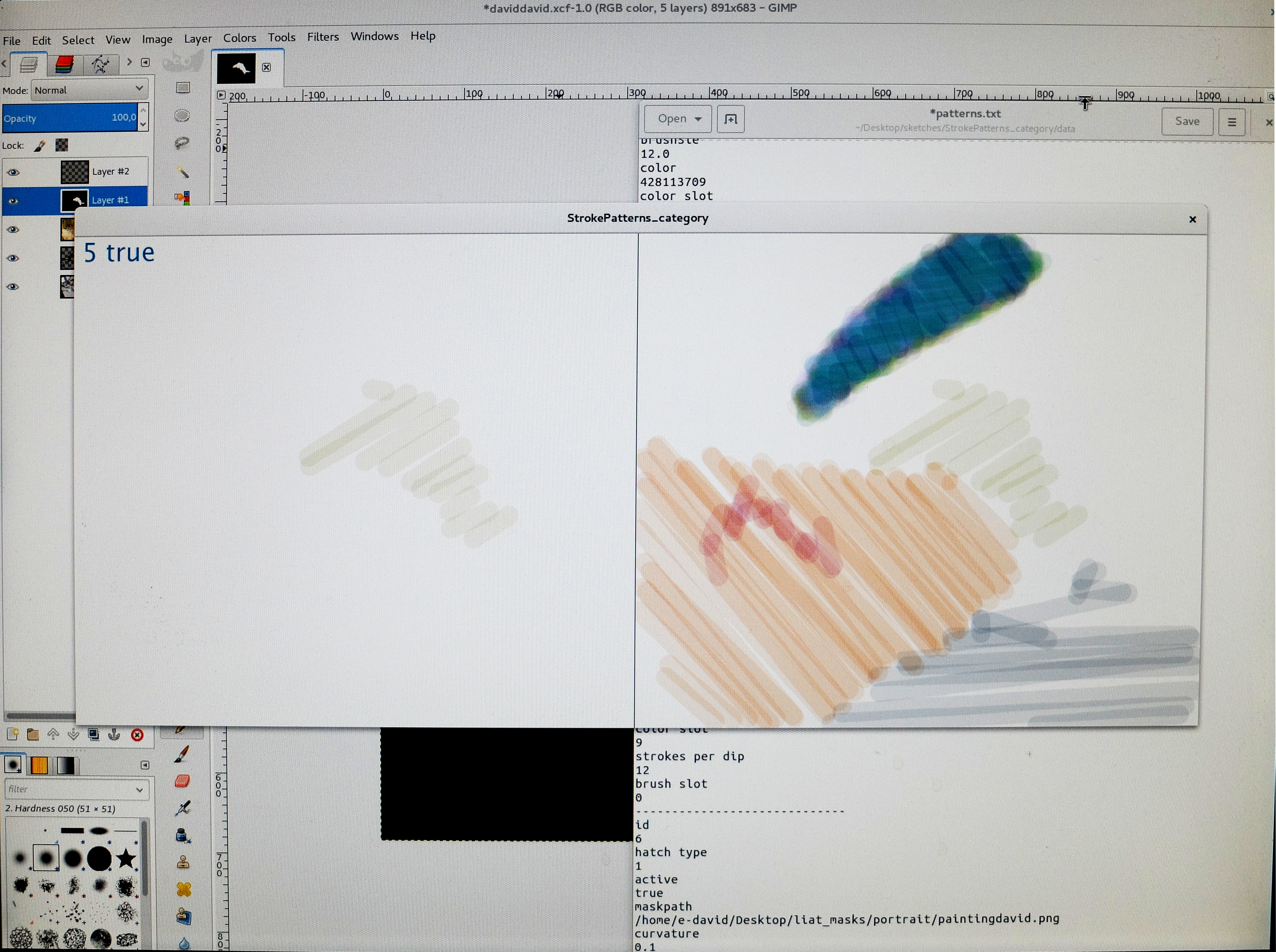
Snapshot of the high level interface that we implemented specifically for the e-David’s “Self Portrait”.
Region Masks
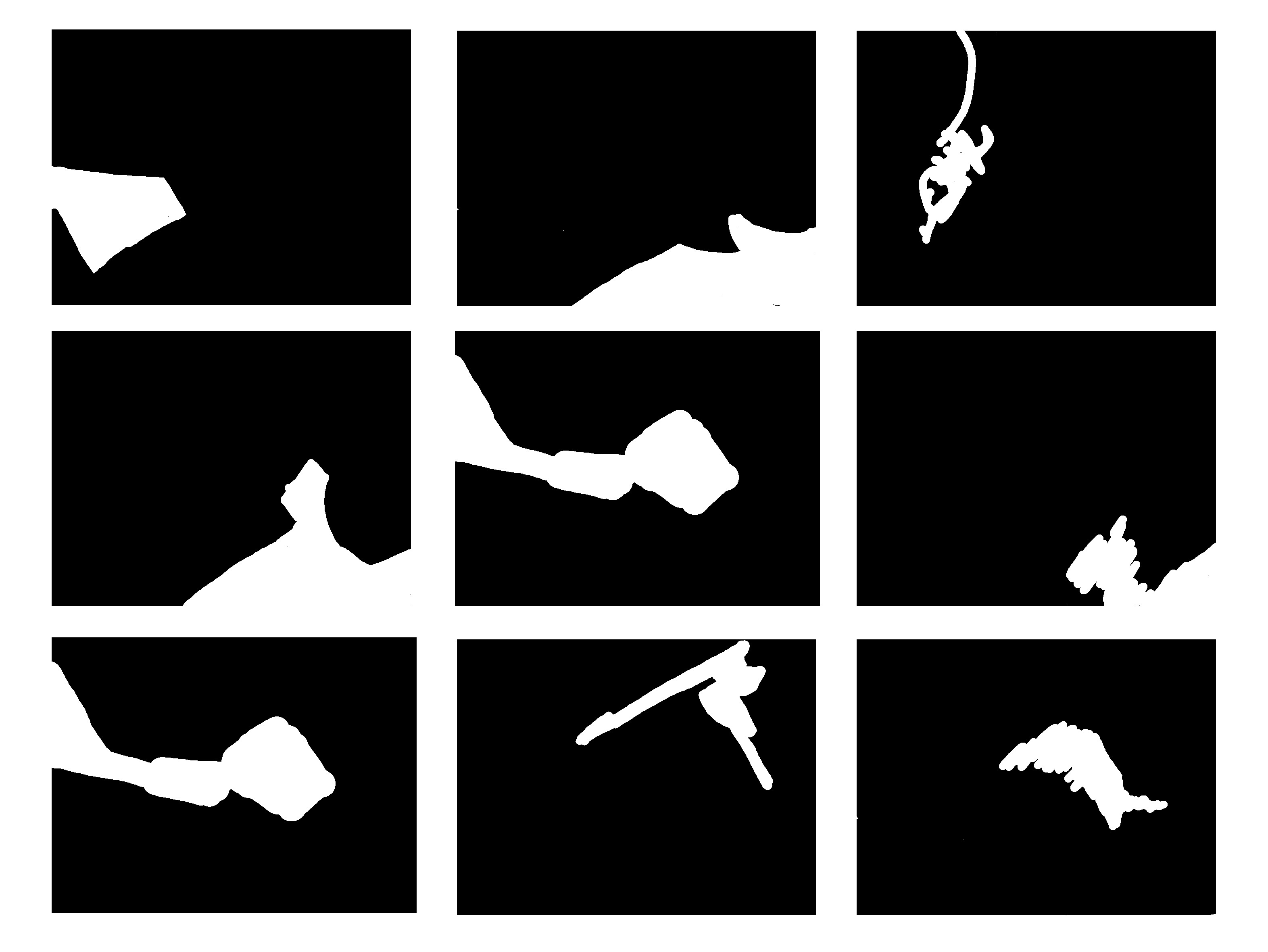
Regions defined by painter Liat Grayver were used to “mask” areas of the virtual canvas (interface) as e-David painted his “Self Portrait”. Different parameters can be set for each individual digital mask, affecting local and global characteristics in the process.
e-David Painting His “Self Portrait”
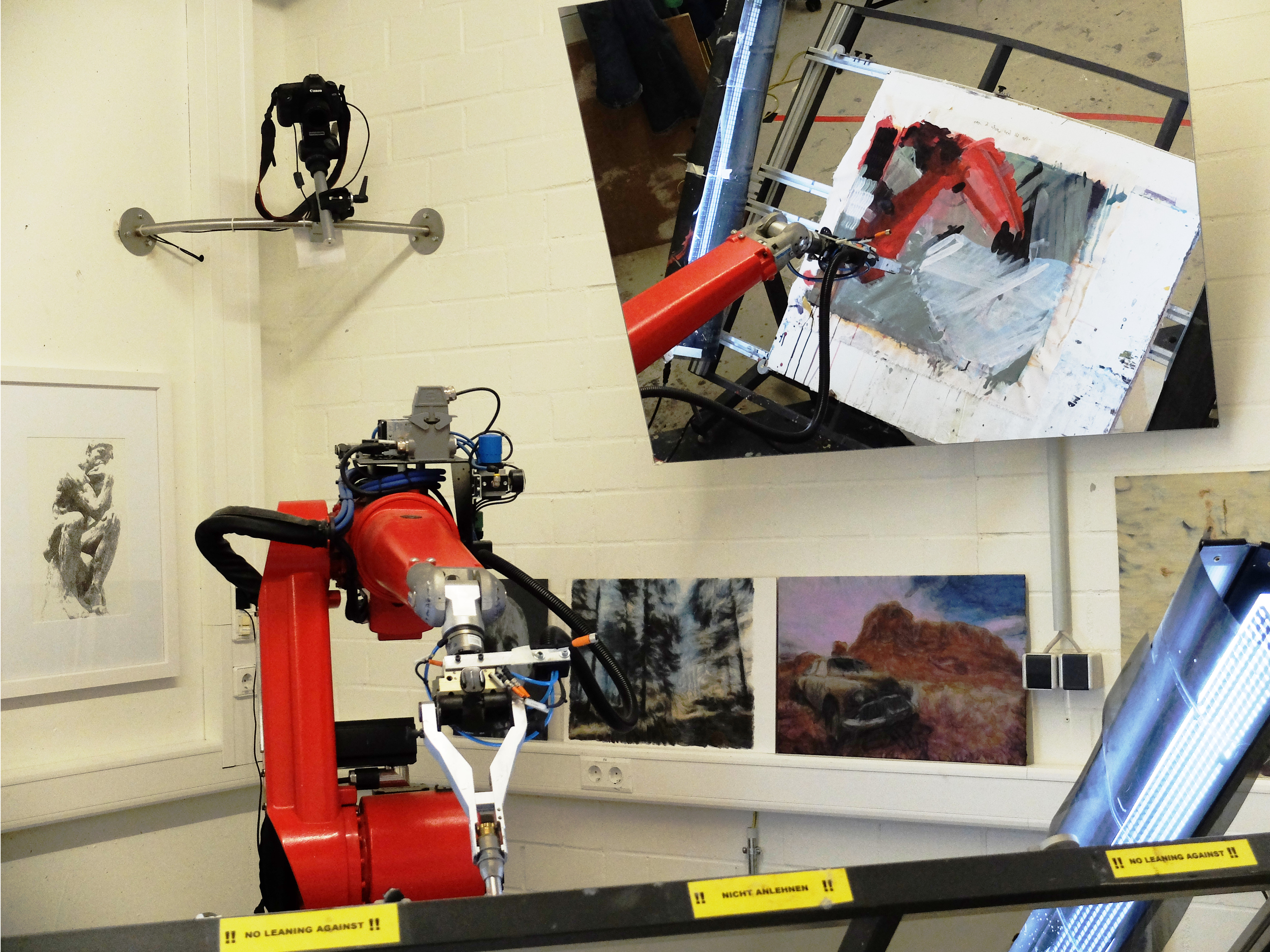
In this photo, we see e-David painting and the digital camera that is part of the visual feedback system used to continuously control and adjust the robot’s painting process. The mirror allows us to oversee the process from outside the reach of the robotic arm.





External links
Video for the exhibition 'Brushstrokes in the Digital Age' where e-David smaller version and some of the paintings created in collaboration with Liat Grayver were shown.
Painting sequence of the self portrait.
e-David Self-Portrait - Liat Grayver and Thomas Lindemeier - November 2016
The linked pdf contains a more detailed description of the creation of the e-David selfportrait
Total Votes: 0
Comments
Log in or sign up to post a comment.