Robotart
Disconnect
(We open source code, and relevant info in this website: https://github.com/unr-arl/uart-robotart-competition)
Category: Original artwork
Disconnect
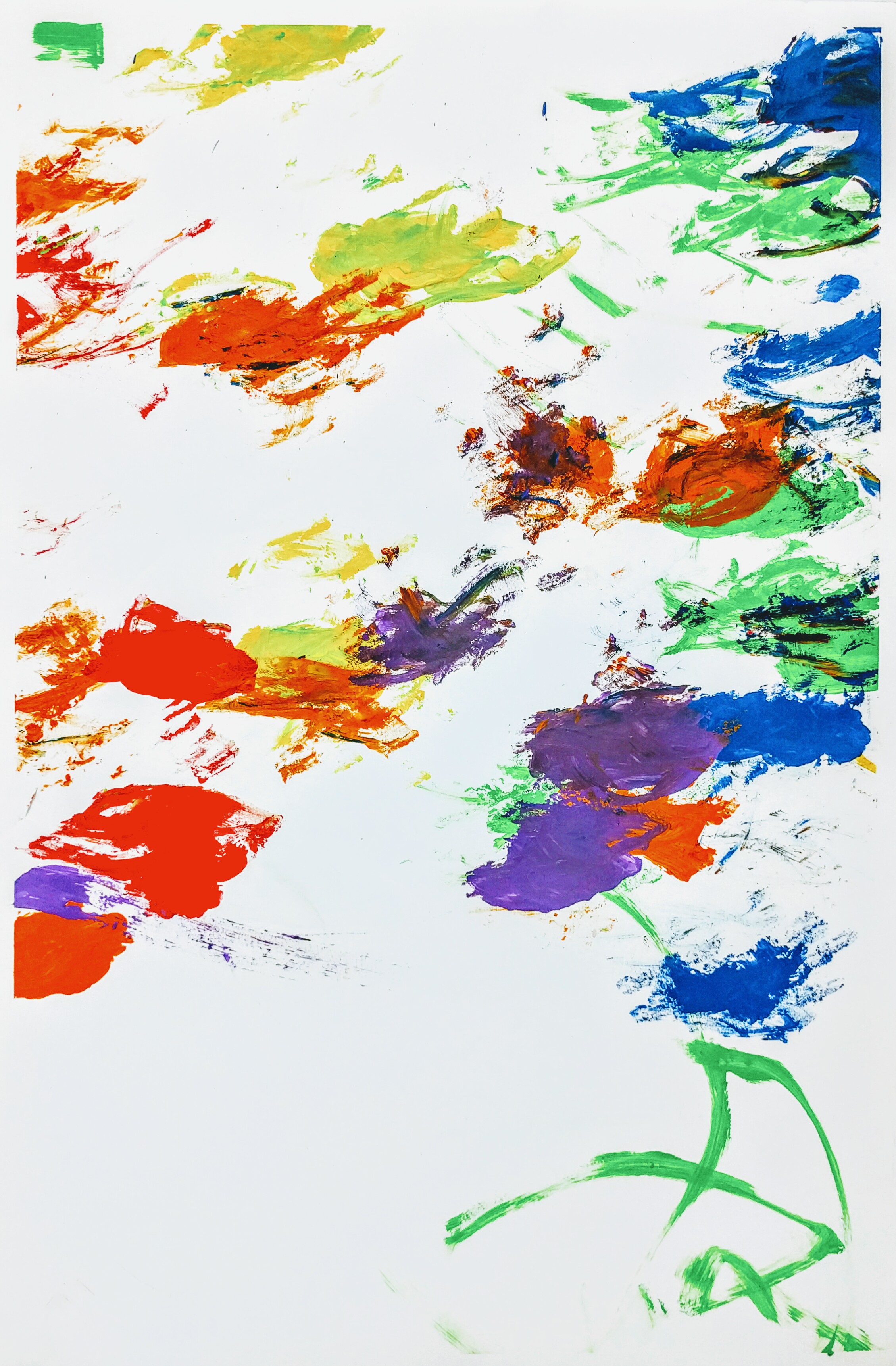
This work of art is an expression of the current disconnect between human robot understanding, communication, and execution. What a human mind perceives and wants to communicates goes through cycles of encoding and decoding before it reaches the robot. This work of art expresses this loss of detail and meaning during the process. While the pre-planned trajectories are ideal representations of the input image, the end result is a non-uniform pattern which encapsulates the effort, and quasi human error of the robot itself. The robot first plans a painting by spawning a random series of dots and colors. The colors of the dots are then matched against the colors of paint available to the drone. From these dots, the robot then translates dots on the two dimensional image plane to a series of three dimensional trajectories to paint the dots as well as get more color on its brush.
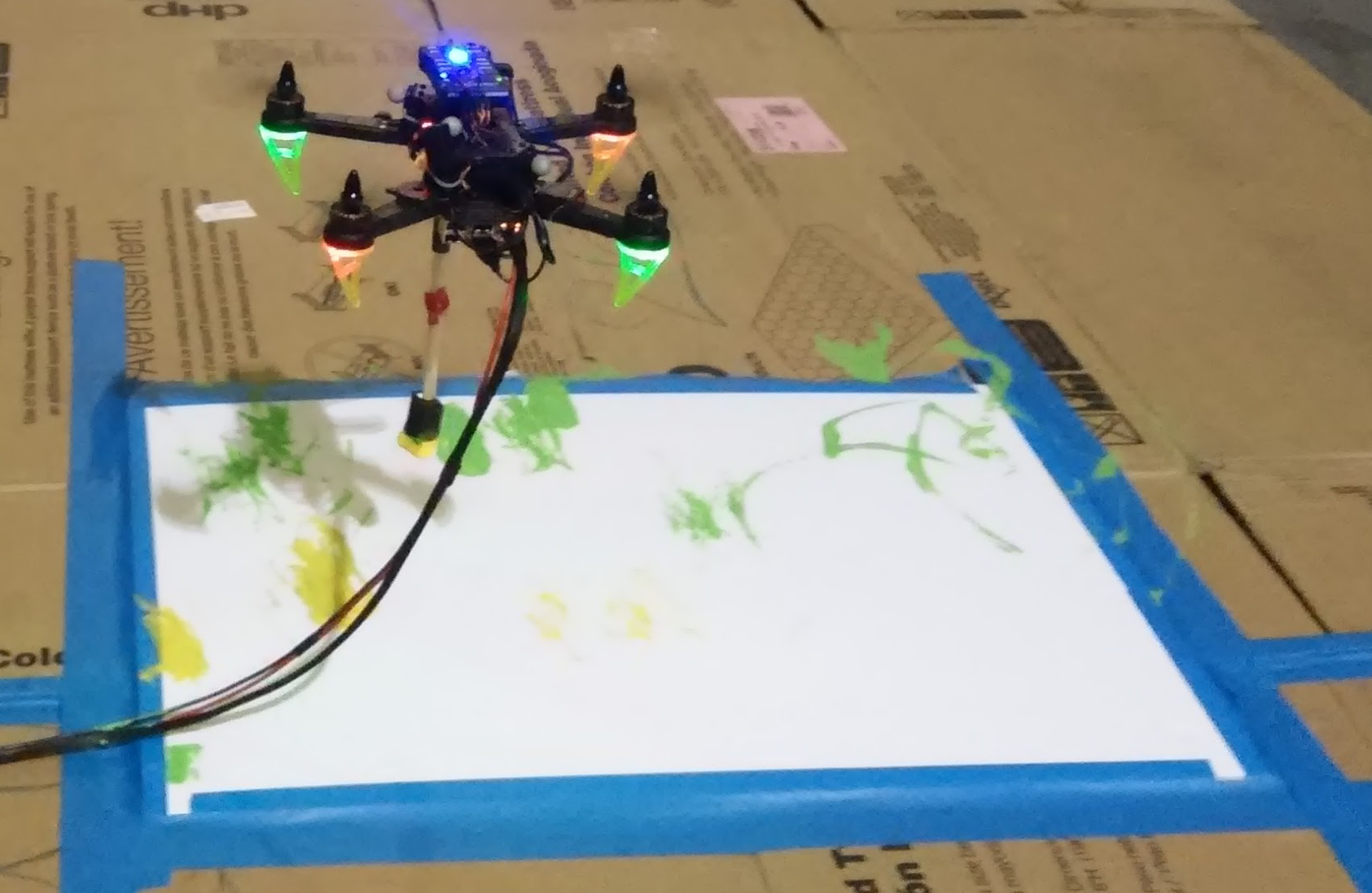
Flying robot
The robot receives position feedback from a precision indoor localization system called VICON. The position controller used is Model Predictive Control, and therefore it is important to note that the drone flies completely autonomously after a controlled take-off by the pilot.

External links

Total Votes: 0
Comments
Log in or sign up to post a comment.