We’re happy to announce that we have created a simple painting robot system for you use in the competition. This is exciting news as finding a simple but well-designed robot has been one of the biggest hurdles for many potential participants.
The robot has 3 cartesian degrees-of-freedom which means that is can move in the x, y and z directions. The dimensions are 60 x 90 x 6cm (24″ x 36″ x 2.5″). The robot is controlled by an Arduino box which is simply connected to your computer by a USB cable.
We will also include software (written in python and OpenCV) to do some basic moving commands and a we’ll include a few examples on how paint with it. This software will run easily on Mac, PC, or Ubuntu computers and does not require anything more than a simple text editor to write.
The cost of the bot is $300 (including shipping) but will reimburse $300 to any US-based public school or university who participates in the competition! That means, participating public schools and universities can get the robot for FREE!
To get a robot, simply signup as a team (if a school, please include your school’s contact information), print out the team page and mail it with a check to:
RobotArt Competition % Conru Foundation 1916 Pike Place, Suite 12, Box #39 Seattle WA 98101
Make sure your mailing address is somewhere on the printout so we can send the robot to you.
The robot will come unassembled but takes about 30-60 minutes to put together. You can see the assembly instructions here.
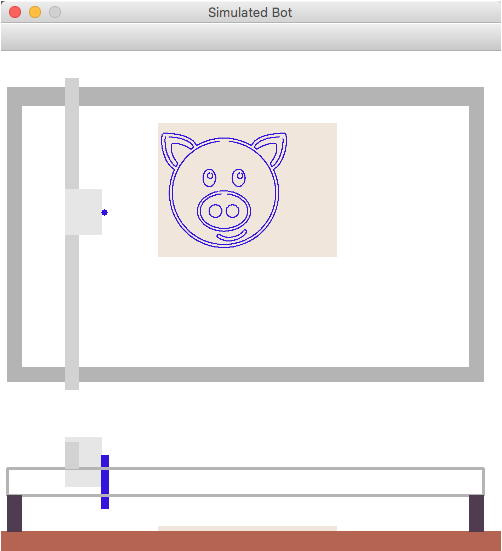
The software to operate the robot (and sample painting scripts to make your first painting) can be downloaded here. The software also has a simulator for the bot so you can write code now and test how it works!
Most basic commands:
# basic moving commands
mybot.go_to_xyz([x, y, z]) # tell bot to go to x,y,z (in cm)
mybot.go_to_xy([x, y]) # move to x, y (z = constant)
mybot.go_to_z(z)
mybot.go_up() # move to highest z location
mybot.setMaxSpeed(20) # cm/secSee more commands and examples here.