Robotart
The Robotic Art Competition
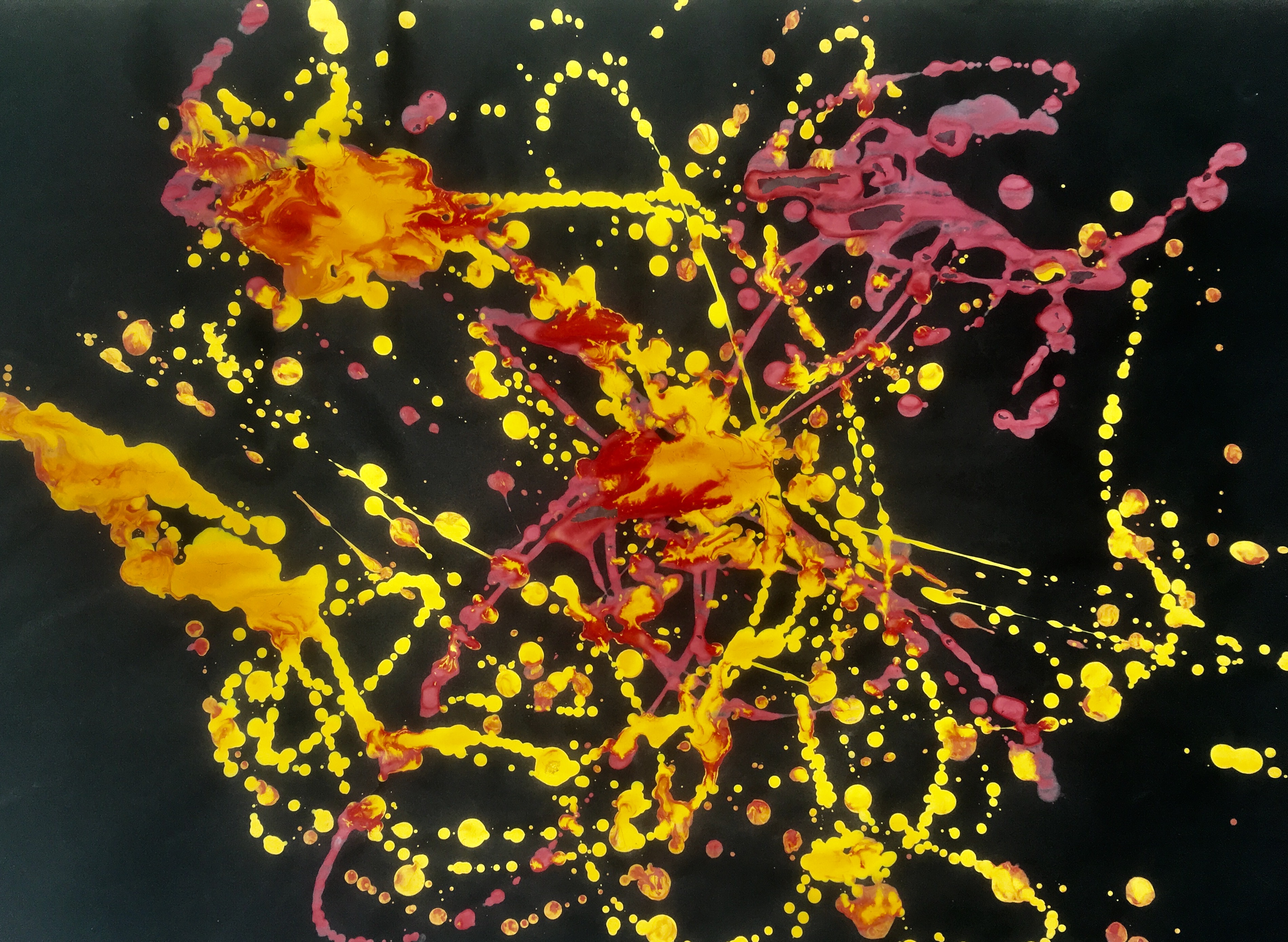
Fire
The robot trajectories for this painting have been calculated by applying physical cost functions like minimum joint torque and jerks.
Category: Original artwork
External links
MethodologyThe linked paper describes the basic mathematical concepts we use to generate painting motions for the robot. Although the painting shown here has been generated by a newer platform, the approach is the same.
RBDL
Library used for robot modeling
MUSCOD-II
Numerical Software Package used for trajectory calculations

Total Votes: 0
Comments
Log in or sign up to post a comment.